Global Mission Parameters
Global mission parameters apply to the entire mission and all its mission tasks. However, whilst some parameter settings are inherited from the global configuration, certain mission task specific parameters can be configured independently and will override the global parameters during the execution of a mission task.
The global mission parameters can be accessed by clicking the mission name at the top of the Mission Planner pane to the left.
General
Mission Mode The following mission modes are available:
- Subsonus Assisted - Requires a Subsonus.
- Standalone (GNSS / Dead Reckoning)
-
Pool Demo
See Mission Modes for more information.
Name - Name of the mission plan. Allows for easy identification, reference and traceability.
Created - Mission plan creation date (system generated).
Modified - Mission plan last modified date (system generated).
Pause Vertical
Note: Pause vertical is only available in Subsonus Assisted Mission Mode.
The Pause Vertical parameter defines the vertical position to which the Hydrus descends at mission start. See Pause Vertical Position.
-
Vertical Mode - Determines the vertical reference point and method of measuring the vertical position during Pause Vertical.
-
Vertical - Distance in metres between the specified vertical mode reference and the Hydrus when starting the mission.
Travel
-
Travel Tilt - Specifies the forward tilt with which Hydrus travels between waypoints during a mission.
Travel tilt is a global mission parameter that determines how much Hydrus tilts up towards the direction that it is travelling to get to a waypoint. By tilting up, Hydrus utilises its forward facing DVL beam to better track the gradient of the upcoming terrain and adjust its altitude to avoid obstacles. This means that setting a larger travel tilt can enhance obstacle detection and avoidance as well as improve altitude tracking. Travel tilt values can be set between 0 and 20 degrees.
-
Capture Pitch - Once Hydrus reaches a waypoint, it will adjust its orientation to match the capture pitch defined by the mission task to allow images to be taken directly down while still travelling with a non-zero travel tilt. Capture pitch values can be set between -20 and 20 degrees.
When executing transect survey mission tasks, upon arrival at a designated picture-taking point, Hydrus adjusts its orientation to 0° or "look down" and captures the image. This enables it to obtain the desired visuals from a downward perspective.
When executing lawnmower survey mission tasks, the Hydrus adjusts its orientation to the user specified pitch and captures the image.
Note: The camera within Hydrus is fixed, and moves with the AUV body.
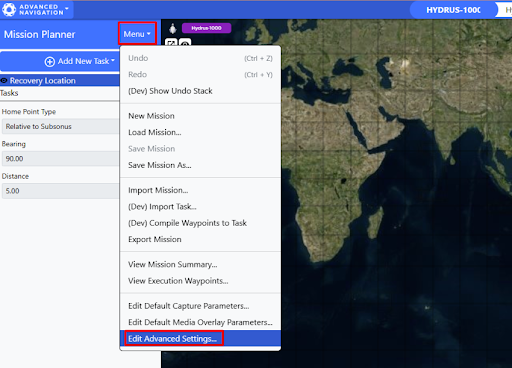
On the Mission Planner Page, navigate to 'Menu → Edit Advanced Settings'
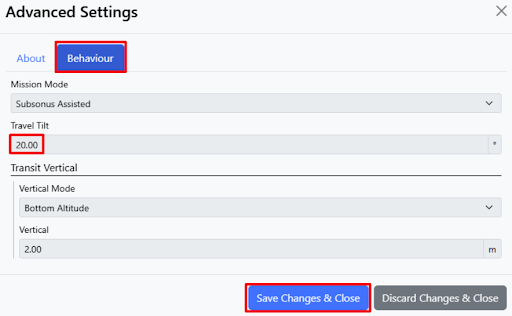
Travel Tilt Settings under the 'Behaviour 'Tab
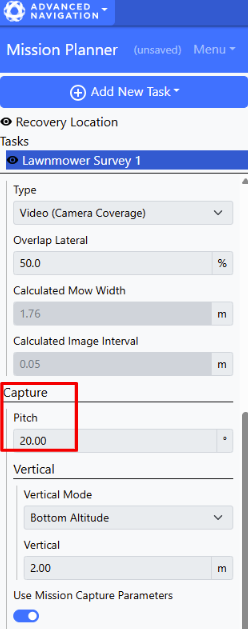
Capture Pitch
Vertical
-
Vertical Mode - Determines the vertical reference point and method of measuring the vertical position during transits between mission tasks.
-
Vertical - Distance in metres between the specified vertical mode reference and the Hydrus when it is necessary for Hydrus to reacquire a navigation reference (DVL bottom lock) during the mission.
Capture
Default Capture Parameters - Global default camera settings. These settings will be inherited to all mission tasks unless they are overridden at mission task level. See Capture Parameters for details.
Media Overlay Parameters
Text overlays can be added to both images and video that are recorded during the mission. This is a global setting and applies to all mission tasks. The following metadata is recorded for both images and videos:
-
System time
-
User comment, if set by user
-
Mission name, if enabled
-
Heading
-
Latitude
-
Longitude
-
Depth / Altitude
-
Kilometric Point (KP)
-
Image Overlay Mode - Integrated Text Overlay - In this mode, a burned watermark with the above-listed is added to every photo.
-
Video Overlay Mode - If this parameter is set to Subtitle File (.vtt), data (time and location) recorded alongside with videos will be written to a vtt subtitle file. These subtitles are synchronised with the recorded footage and can easily be shown or hidden from the footage.
-
User Comment - Free text field that will be included in the media overlay, unless it is left empty.
-
Record Mission Name - When this setting is enabled, the mission name will be included in the media overlay.
Recovery Location
Home Point Type
-
Launch Location - In Standalone (GNSS/ Dead Reckoning) mission mode, this setting will instruct Hydrus to return to the same location from where it was deployed.
-
Geodetic Location - This home point type allows you to define the recovery location as geodetic coordinates (longitude and latitude).
-
Relative to Subsonus - In Subsonus Assisted mission mode, the recovery location can be specified as a Bearing and Distance of the Hydrus relative to the position of the Subsonus. If the position of the Subsonus changes during the mission, the recovery location will change accordingly.
When Reaching Recovery Location
-
Go to Surface - Hydrus will navigate to the recovery location and resurface directly. Hydrus will then utilise its thrusters to counteract any surface currents to remain in position.
-
Hold Position - Upon reaching the specified recovery location Hydrus will hold a vertical position as per the Vertical Mode and Vertical settings.
Vertical Mode
-
Bottom Altitude - This mode allows the user to set a height above the seafloor. Hydrus will maintain this altitude while following the lawnmower/transect pattern during the survey.
-
Surface Depth - This mode allows the user to define the depth of the Hydrus from the water surface. In this mode, the depth is measured in metres below the water surface. By setting a specific surface depth value, Hydrus will maintain a consistent depth below the water surface while following the survey path. This mode is useful when the focus is on capturing data at a specific depth level, such as conducting surveys near the water surface or targeting specific water layers.
-
Geodetic Height - This mode allows Hydrus to be set of a geodetic height, which is a measure of vertical distance above or below a specific geodetic reference point, such as the Earth's ellipsoid. By setting a specific geodetic height value, Hydrus can maintain a consistent altitude relative to the chosen reference datum throughout the survey. This mode is particularly useful when conducting surveys that require precise geospatial positioning and referencing, such as mapping, geodetic measurements, or integration with external geodetic datasets.
Note: Geodetic height only works in Subsonus Assisted mission mode and requires a GNSS fix from an external source e.g. a GNSS Compass.
Vertical - This setting determines the vertical position for the recovery location. It is define as a distance in metres between the Hydrus and the vertical reference point determined by the Vertical Mode setting.