Magnetic Calibration
For the best heading accuracy possible, magnetic calibration is recommended to be carried whenever the magnetic signature of the surrounding environment has changed. For example, when the Hydrus unit has been transported a long distance (more than 100 km) to a new geographic location, it should be recalibrated. The following sections cover how to verify magnetic calibration and how to calibrate the unit using the two different methods available; 3D calibration and setting HSI offset values manually.
Magnetic Calibration Verification
To assess if recalibration is needed, perform magnetic calibration verification:
-
In the Main Menu, navigate to Tools → Magnetic Calibration.
-
Wait for the Hydrus to obtain a GNSS fix.
-
Hold the Hydrus with the camera facing down and point the Hydrus thrusterless side towards north.
-
Check the Current Heading field, it shows the current heading as reported by the INS.
-
Cross-check the heading reading against that of an analogue compass or other accurate and reliable heading source. If the calibration is valid, the heading value should display a value close to 0 when Hydrus is pointing to the north. If the heading is not accurate, it is necessary to re-calibrate the unit.
3D Calibration
Before commencing magnetic calibration:
-
Hydrus needs a GNSS position fix. To obtain a GNSS position fix, take the Hydrus outside to a place with a clear view of the sky.
-
Magnetic calibration should always be carried out outdoors in an open environment with little to no magnetic interference, such as a park. It is strongly recommended not to perform magnetic calibration whilst on board a vessel. Sources of high magnetic interference include (but aren’t limited to): large metal objects, high current cables, cell towers, radar sites, power poles, mobile phones etc. If possible, try to maintain at least a 100 - 200 metre distance from any magnetic sources. Items of clothing such as steel-cap boots and electronic watches can also contribute to interferences with the magnetic calibration.
Note: A traditional compass can be utilised to mark magnetic north for reference prior to magnetic calibration.
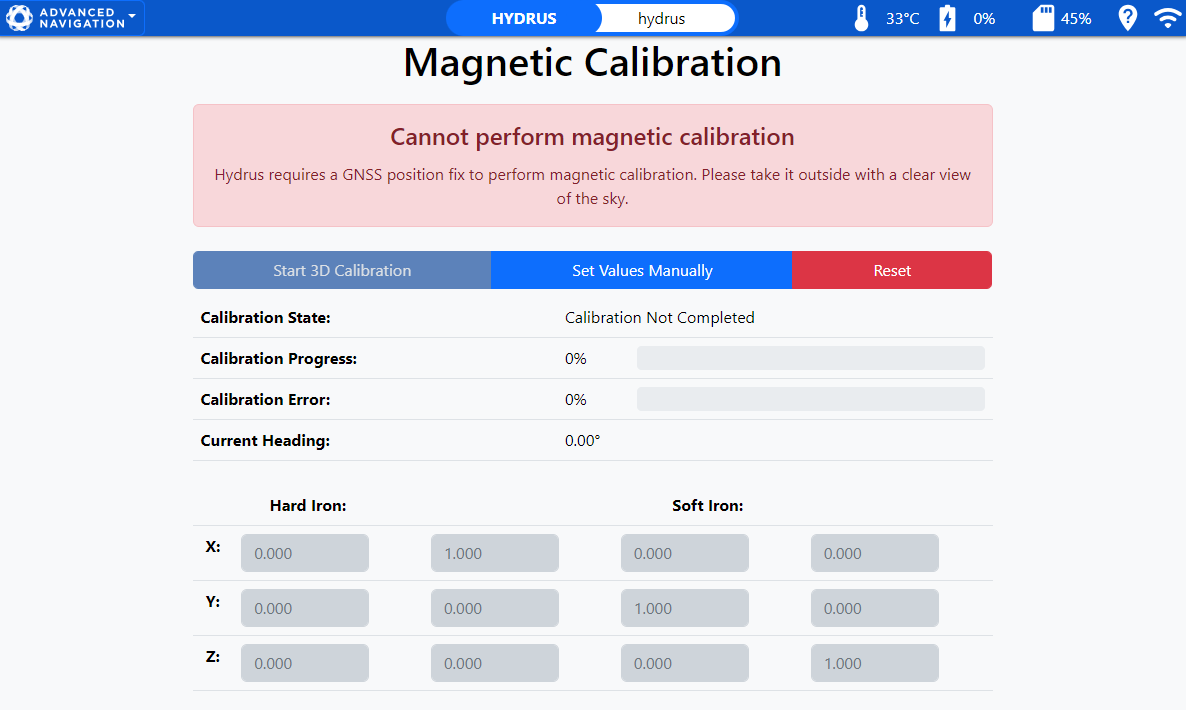
Hydrus Web UI Magnetic Calibration Page
-
In the Main Menu, navigate to Tools → Magnetic Calibration.
-
Wait for the Hydrus to obtain a GNSS fix.
-
Click Reset.
-
Click Start 3D Calibration and pick up the Hydrus unit and hold it with both hands.
-
Until the Calibration State changes to "Completed" and the Calibration Progress bar reaches 100%, do the following:
-
Hold the Hydrus camera facing down and face the thrusterless side towards magnetic north, then rotate the unit horizontally around its centre point of the z-axis for two full 360° rotations.
-
Rotate the Hydrus vertically around its centre point of the y-axis through another two full 360° rotations.
-
With the camera facing down and facing the thrusterless side towards magnetic north, turn the Hydrus 90° horizontally and repeat another two full 360° rotations around its centre point of the x-axis.
-
Rotate the Hydrus unit around its centre point along all axes in a random fashion.
-
-
Click Save once the calibration status in the Hydrus web UI says "Completed"
-
Verify the heading accuracy of the calibrated unit by cross-checking the heading reading against that of an analogue compass or other accurate and reliable heading source.
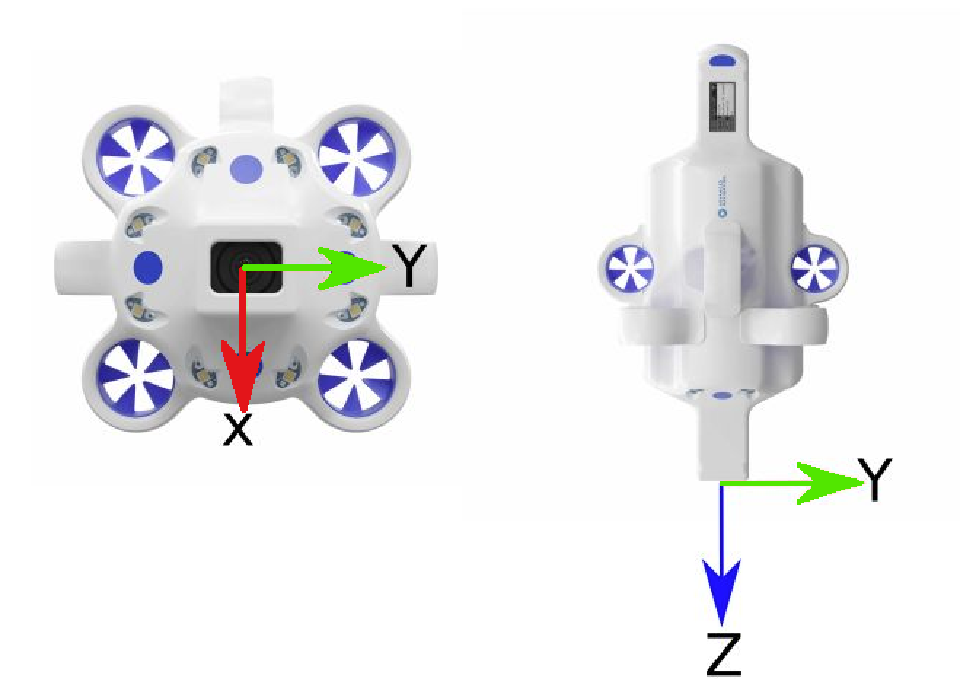
Hydrus' Navigation Axes

When commencing Magnetic Calibration, face the thrusterless side of the Hydrus towards Magnetic North.
Set HSI Offset Values Manually
For use cases that require custom calibration offsets to be compensated for, HSI offset values can be set manually.
Note: All HSI offset values are in milli Gauss (mG).
-
In the Main Menu, navigate to Tools → Magnetic Calibration.
-
Click Reset.
-
Click Set Values Manually.
-
Enter the hard iron offset correction values for X, Y and Z.
-
Enter the soft iron calibration values in the 3x3 matrix.
-
Click Save once the calibration is complete.
-
Verify the heading accuracy of the calibrated unit by cross-checking the heading reading against that of an analogue compass or other accurate and reliable heading source.