Mission Task Profile Examples
If the user seeks specific survey results tailored to different objectives, we recommend considering the following Lawnmower Survey examples: Sparse Lawnmower, Dense Lawnmower, Super Dense Lawnmower and Transect Survey. Each example is designed to address distinct survey requirements and offers optimised settings to achieve the desired outcomes.
Sparse Lawnmower Survey
If the user's goal is to conduct reconnaissance and gather bathymetric data without image overlap, the Sparse Lawnmower variant is ideal. With a focus on high-altitude operation and capturing distinct images, this variant enables detailed bathymetry observation for in-depth analysis and mapping.
| Setting | Value |
|---|---|
| Name | Sparse Lawnmower |
| Path Generation | |
| Lawnmower Orientation | 0 - 360° |
| Coverage | |
| Type | Image (Fixed Distance) |
| Overlap Lateral | 50% |
| Mow Width | 10.0 m |
| Distance | 1.0 m |
| Capture | |
| Pitch | 0° |
| Vertical | Mode
Bottom Altitude Value 4.00 m |
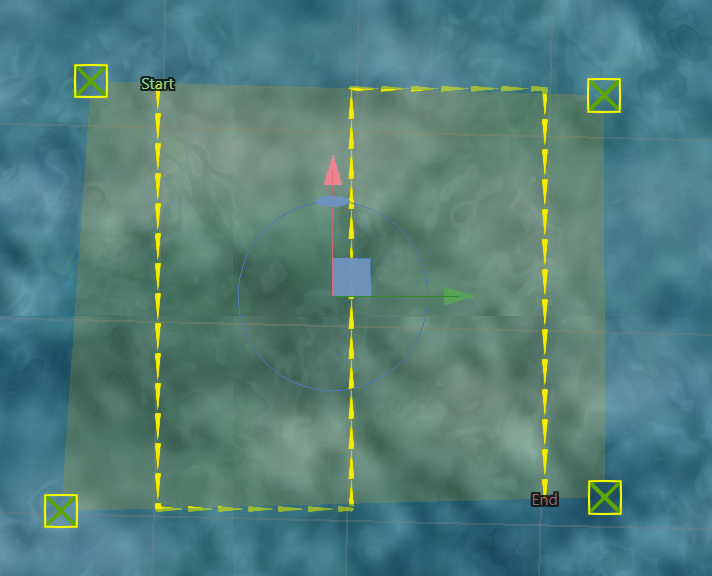
Sparse Lawnmower Survey Path Visualisation
Dense Lawnmower Pattern
The Dense Lawnmower pattern is designed to achieve high-resolution mapping objectives. It is employed when there is a reasonably accurate understanding of the bathymetry in the survey area. The pattern incorporates a minimum of 20% image overlap to ensure comprehensive coverage of the seabed and capture detailed data for mapping purposes.
| Setting | Value |
|---|---|
| Name | Dense Lawnmower |
| Path Generation | |
| Lawnmower Orientation | 0° - 360° |
| Coverage | |
| Type | Image (Camera Coverage) |
| Overlap Forward | 30% |
| Overlap Lateral | 50% |
| Capture | |
| Pitch | 0° |
| Vertical | Mode
Bottom Altitude / Surface Depth / Geodetic Height Value Bottom Altitude 0.5 - 8 m Surface Depth 0 - 300 m Geodetic Height - to + |

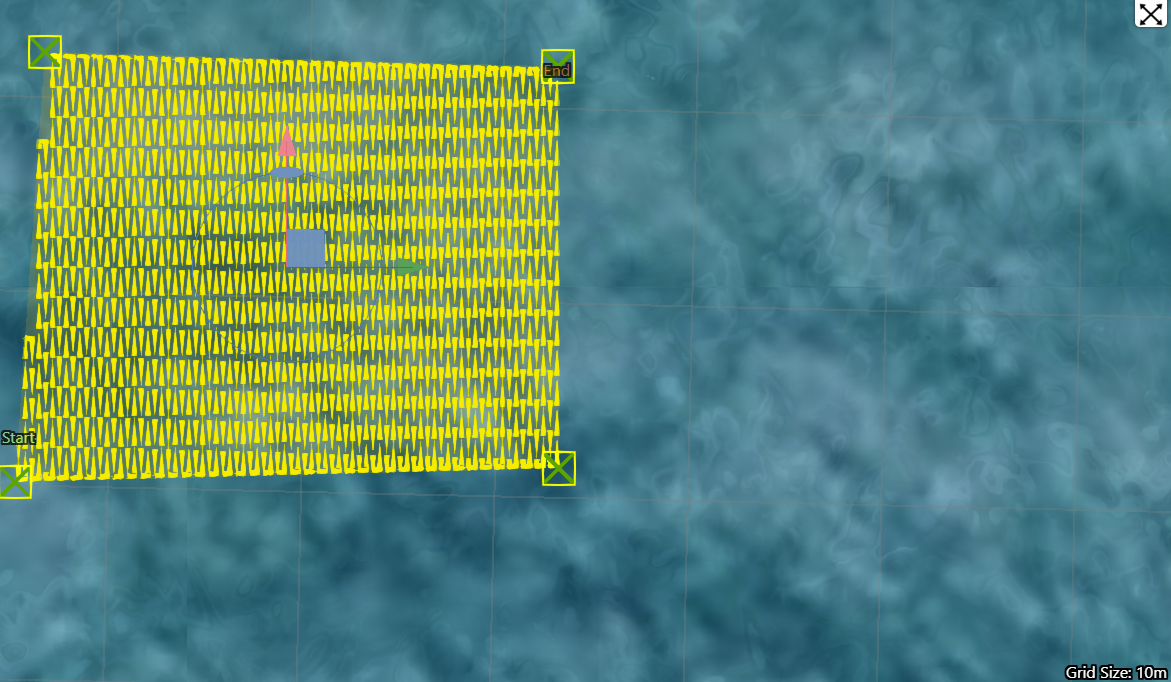
Dense Lawnmower Survey Path Visualisation
Super Dense Lawnmower Pattern
The Super Dense Lawnmower pattern is specifically designed for achieving precise 3D photogrammetry reconstruction. It is employed when the objective is to capture an extensive level of detail in a known location. The pattern incorporates a 50-80% overlap of images and involves multiple super dense surveys conducted at different orientations to ensure comprehensive coverage and capture the necessary detail for reconstruction. In certain cases where photogrammetry is intended to be performed on the resulting imagery, it is advised to repeat the same lawnmower pattern at a 90 degree rotation to the first lawnmower task to ensure adequate feature definition.
Assistance from contour information can enhance the accuracy and effectiveness of the pattern. For information on uploading of contour information files or seabed infrastructure files see Mapping Enhancements.
| Setting | Value |
|---|---|
| Name | Super Dense Lawnmower |
| Path Generation | |
| Lawnmower Orientation | 0° - 360° |
| Coverage | |
| Type | Image (Camera Coverage) |
| Overlap Forward | 50% |
| Overlap Lateral | 80% |
| Capture | |
| Pitch | 0° |
| Vertical | Mode
Bottom Altitude / Surface Depth / Geodetic Height Value Bottom Altitude 0.5 - 8 m Surface Depth 0 - 300 m Geodetic Height - to + |
Super Dense Lawnmower Pattern Visualisation
Transect Survey
The Transect Survey is used to survey a designated route. This mission profile is useful tasks such as assessing the state of a pipeline or sampling environmental diversity along a line.
| Setting | Value |
|---|---|
| Name | Transect Survey |
| Path Generation | |
| Lawnmower Orientation | 0 |
| Coverage | |
| Type | Image (Camera Coverage) |
| Overlap Forward | 80% |
| Capture | |
| Vertical | Mode
Bottom Altitude / Surface Depth / Geodetic Height Value Bottom Altitude 0.5 - 8 m Surface Depth 0 - 300 m Geodetic Height - to + |
Transect Survey Visualisation
Wall Survey
The Wall Survey is used to assess the state of a vertical wall. If using Hydrus with a tether line, ensure you continuously manage the slack in the tethered line. Too little slack and the the Hydrus won't be able to reach the extent of the survey area. Too much slack, and the tether has potential to get tangled.
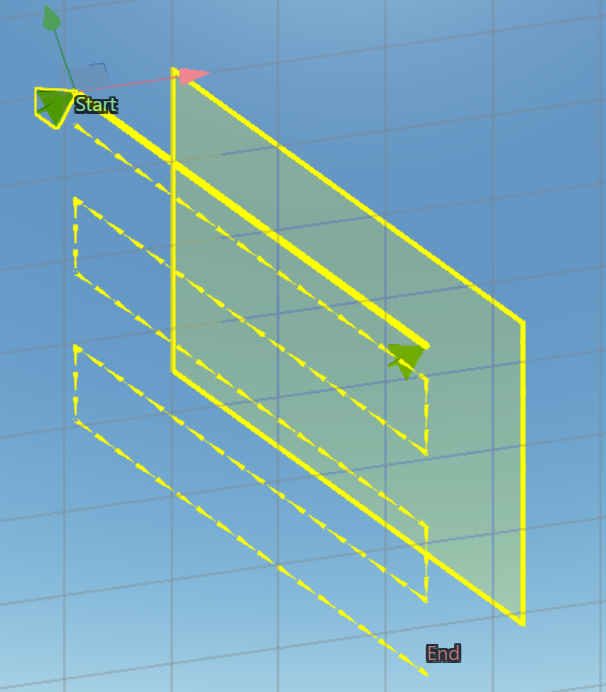
Wall Survey Visualisation