The Sensor Co-ordinate Frame
Inertial sensors have 3 different axes: X, Y and Z and these determine the references around which angles and accelerations are measured. It is very important to align these axes correctly in installation, otherwise the system won't work correctly.
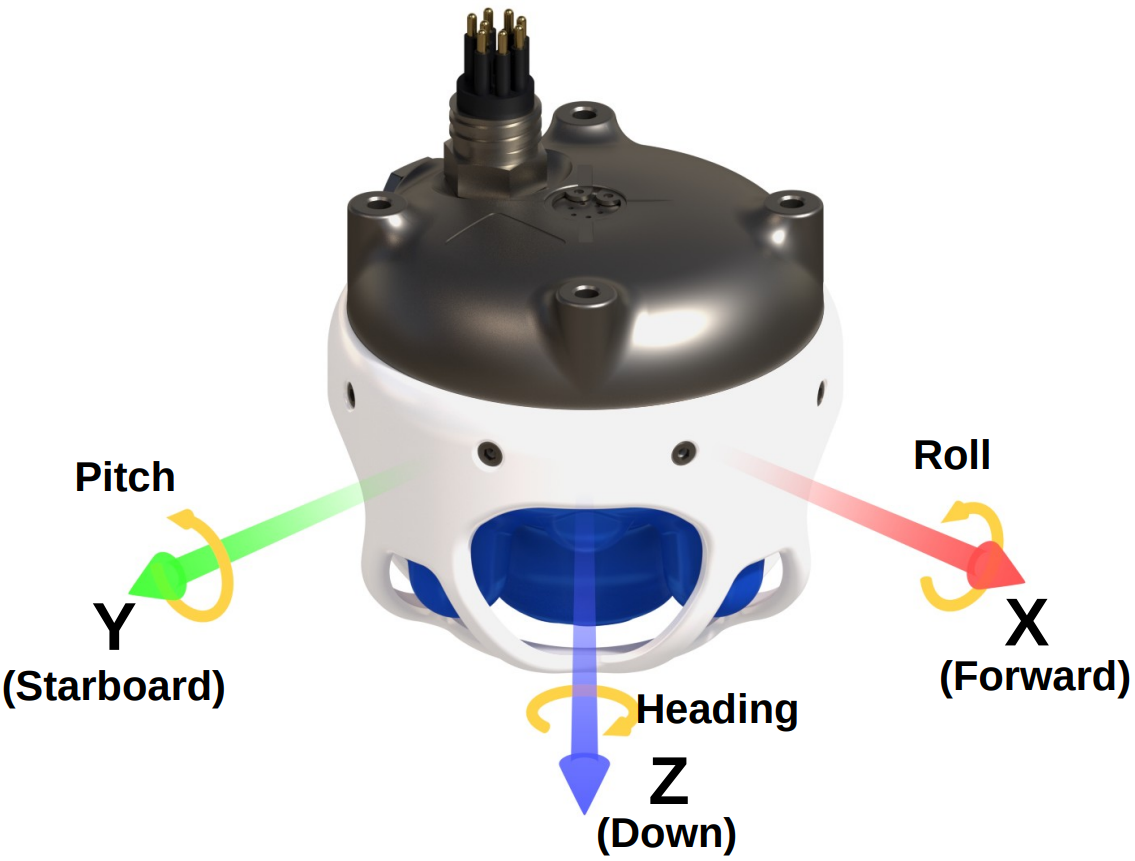
These axes are marked on the top of the device as shown in Subsonus Tag Axes below, with the X axis pointing
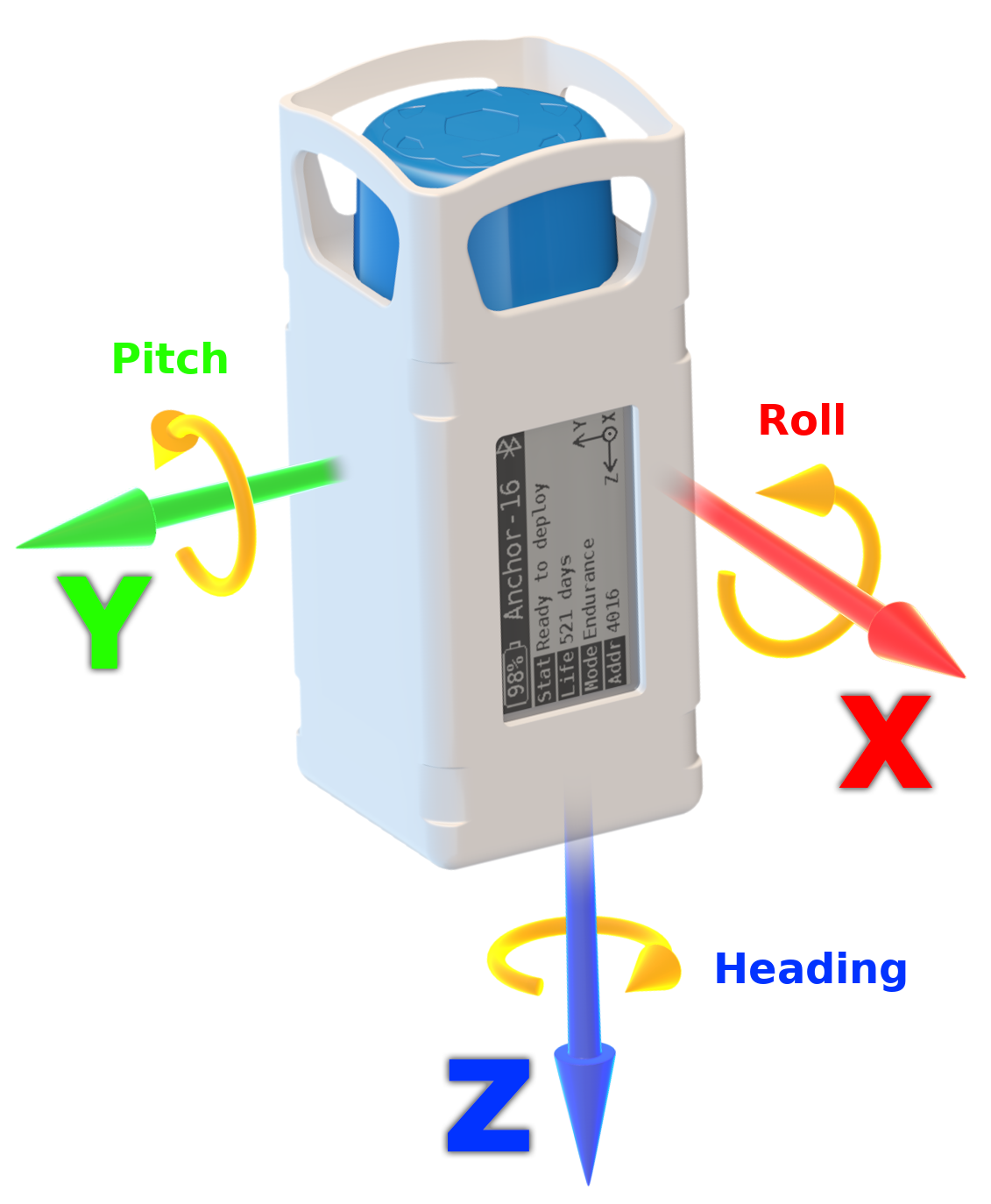
Surface Unit
The surface unit is mounted upside down on a pole attached to the side of a ship. As the surface unit is mounted upside down its axes are different from the subsea variant, see Subsonus Tag Axes.
Right Hand Rule
When installed in an application the X axis should be aligned such that it points forwards and the Z axis aligned so that it points down when the system is level. A good way to remember the sensor axes is the right hand rule, which is visualised in First Right-hand Rule.
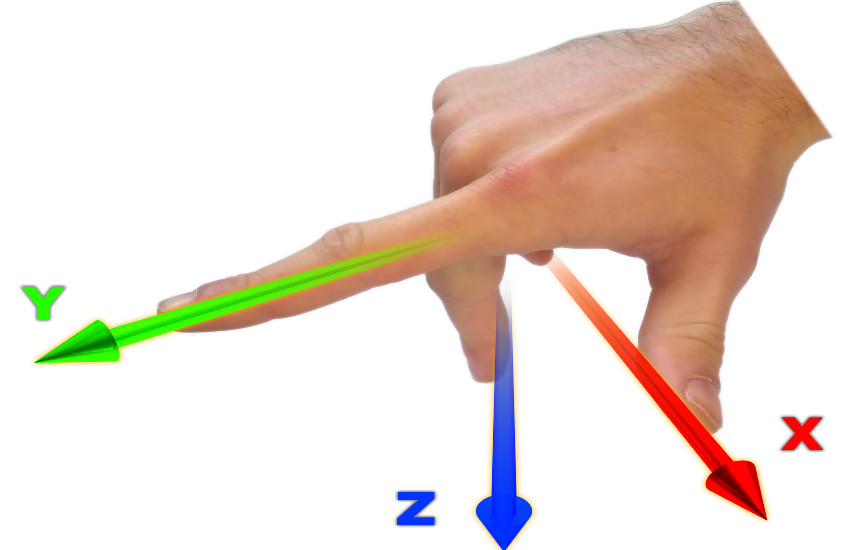
You take your right hand and extend your thumb, index and middle. Your thumb then denotes the positive X axis, your index denotes the positive Y axis and your middle denotes the positive Z axis.