Roll, Pitch and Heading
Orientation can be described by the three angles roll, pitch and heading: these are known as the Euler angles. The rotation axes of roll, pitch and heading are shown visually in Boreas Axes. The arrow indicates the positive rotation direction.
Roll is the angle around the X axis and is zero when the unit is level. Pitch is the angle around the Y axis and is zero when the unit is level. Heading is the angle around the Z axis and is zero when the positive X axis is pointing to true north.
Second Right Hand Rule
The two right hand rules are often the best way to memorise the sensor axes and directions of positive rotation. The first right hand rule gives the positive axis directions and is described in The Sensor Co-ordinate Frame. The second right hand rule shown in the figure below provides the direction of positive rotation. To use it, point your thumb in the positive direction of that axis, then the direction that your fingers curl over shows the positive rotation on that axis.
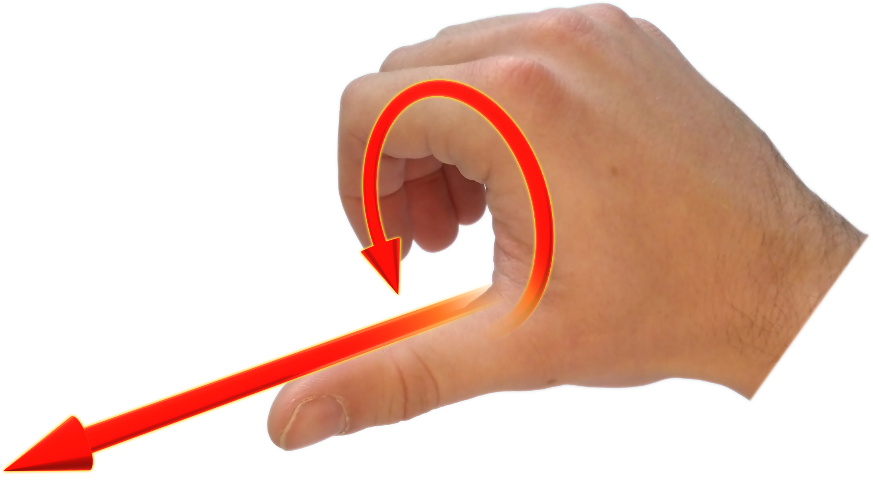
Second right Hand Rule
Rotation Order
When multiple axes are rotated, to imagine the final orientation the three rotations must be performed in the order heading first, then pitch and then roll. To deduce the final orientation the unit should first be considered level with the X axis pointing north and the Z axis pointing down. Heading is applied first, then pitch is applied and finally roll is applied to give the final orientation. This can be hard for some people to grasp at first and is often best learned experimentally by rotating Boreas with your hand whilst watching the orientation plot in real time on the computer.