View Menu
The View menu contains the options for viewing pages of data from the INS.
Map
This takes the user back to the home page of the web UI with the map display.
Device Information
The Device Information page is useful for users when requesting technical support and for tracking their serial number, firmware version, and hardware version.

INS Web UI Device Information Page
Status
The Status shows the current status of Boreas as reported by sections System State Packet (ID#20) .
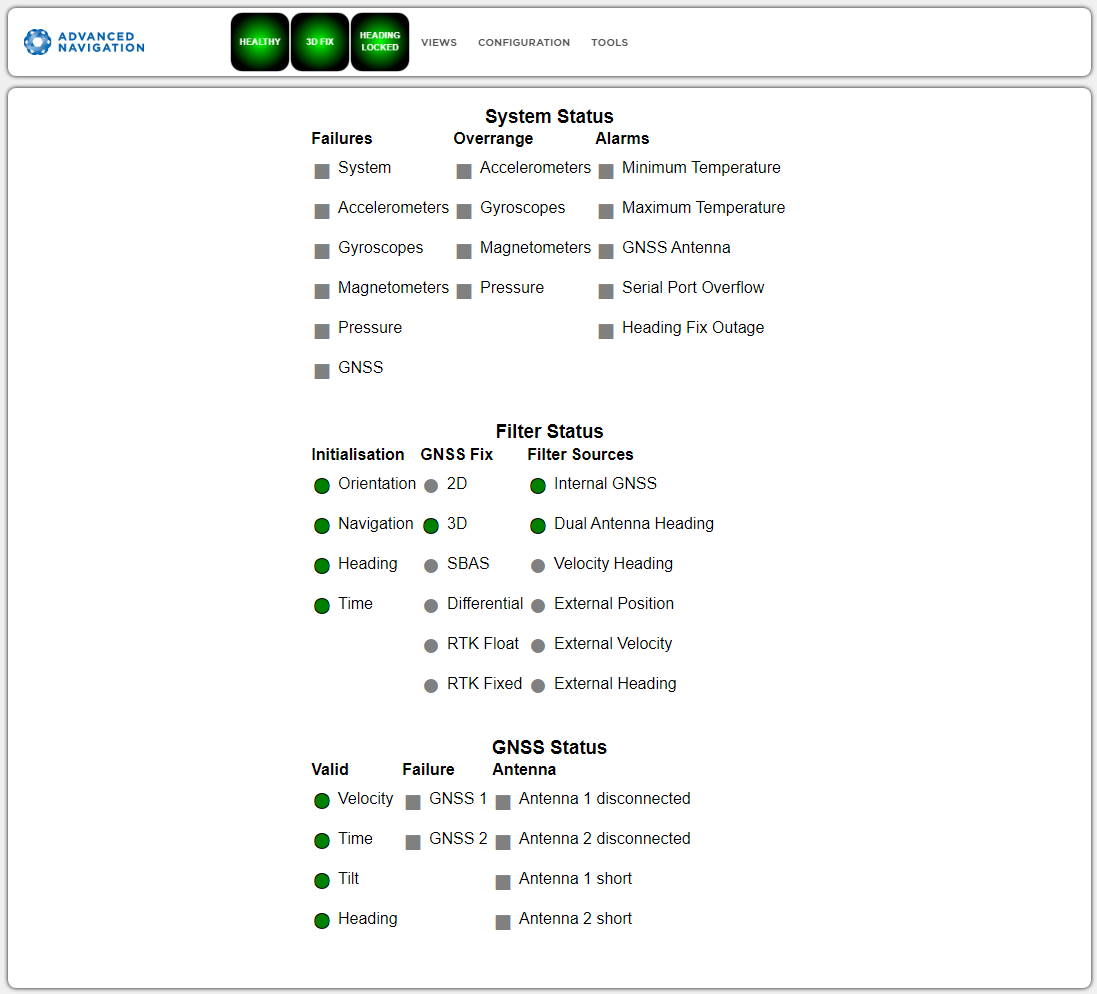
INS Web UI Status Page
Satellites
Note: The satellites page will only display satellite data if your device has access to a GNSS receiver.
The information is displayed as a satellite skyplot, a table and an SNR graph. A maximum of 28 satellites will be displayed, even if more are accessible. This plot shows the SNR of each satellite at the primary and secondary antenna. As a guideline, these should be within 5-10 dB of each other in the absence of cable or antenna faults
INS Web UI Satellites Page
Raw Sensors
The Raw Sensors page shows the
In the lower plot only the air pressure is plotted. The current value from the internal temperature sensors are given on the right. These do not provide general environmental temperature.
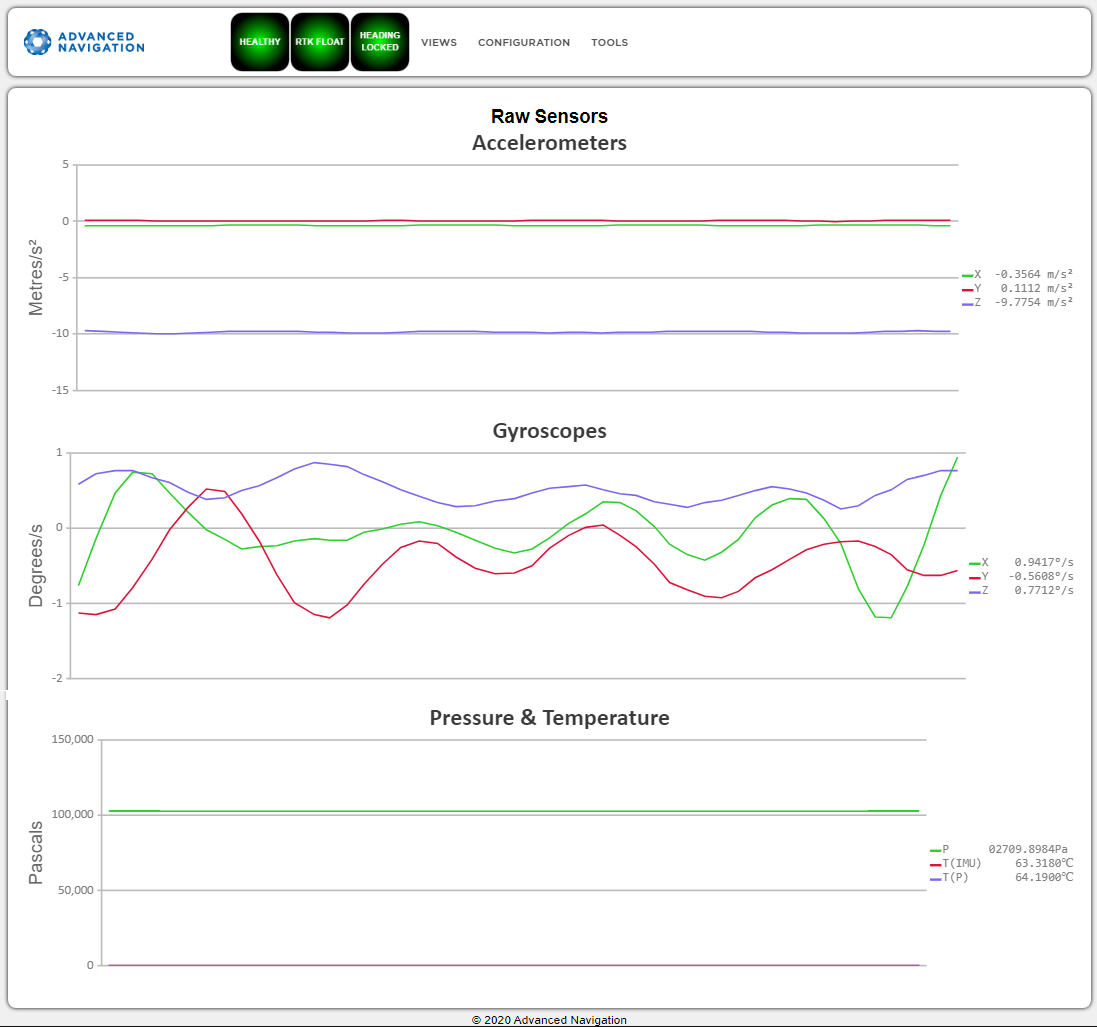
Web UI Raw Sensors Page
Orientation
The Orientation page shows the INS orientation and angular velocity. Course is determined by measuring sequential positions. Slip is the difference between the heading and the course.
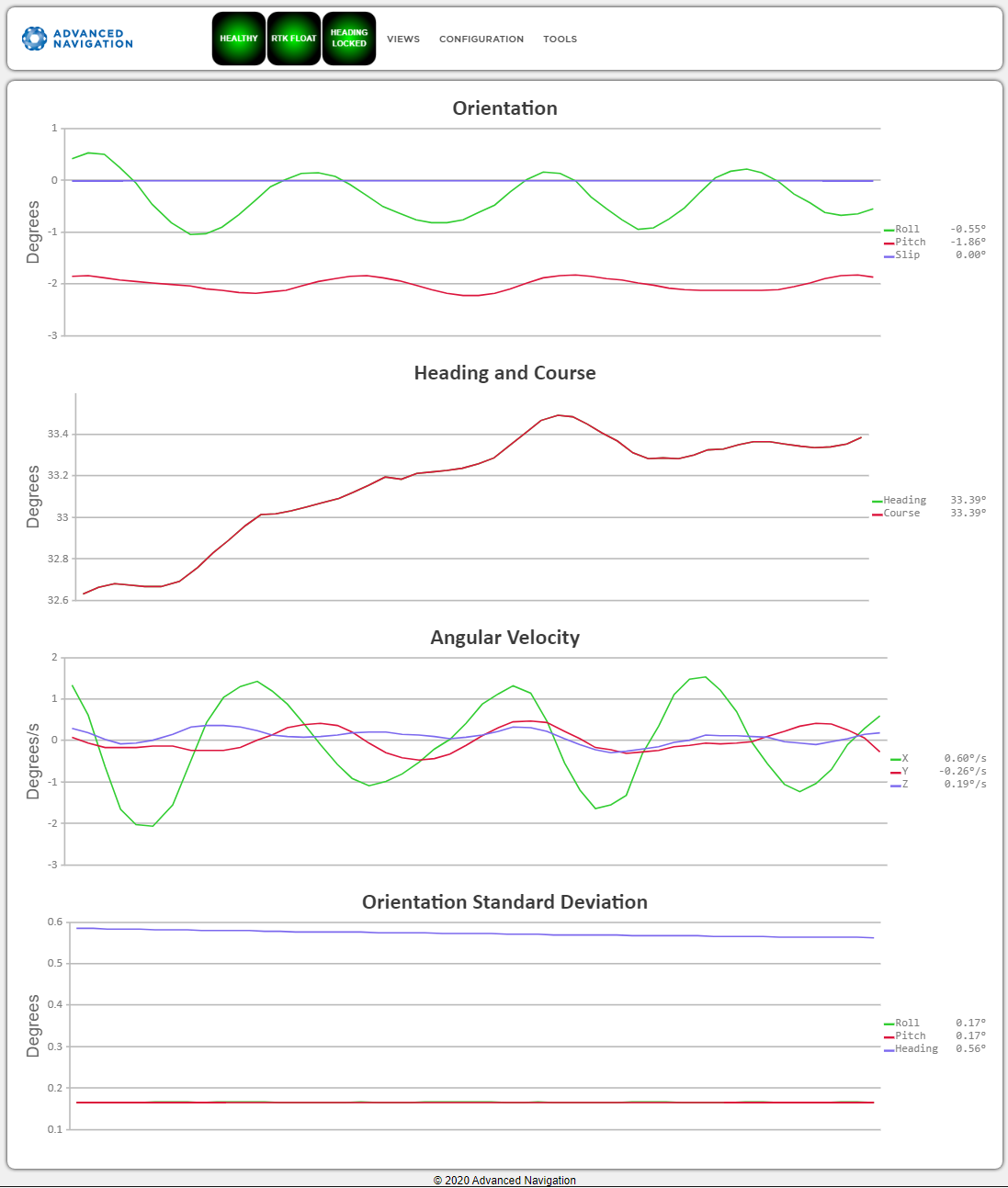
INS Web UI Orientation Page
Position
The Position page shows the INS position and position standard deviation. Latitude and longitude are converted to North and East metres from a reference point that can be reset by refreshing the web page in your browser.
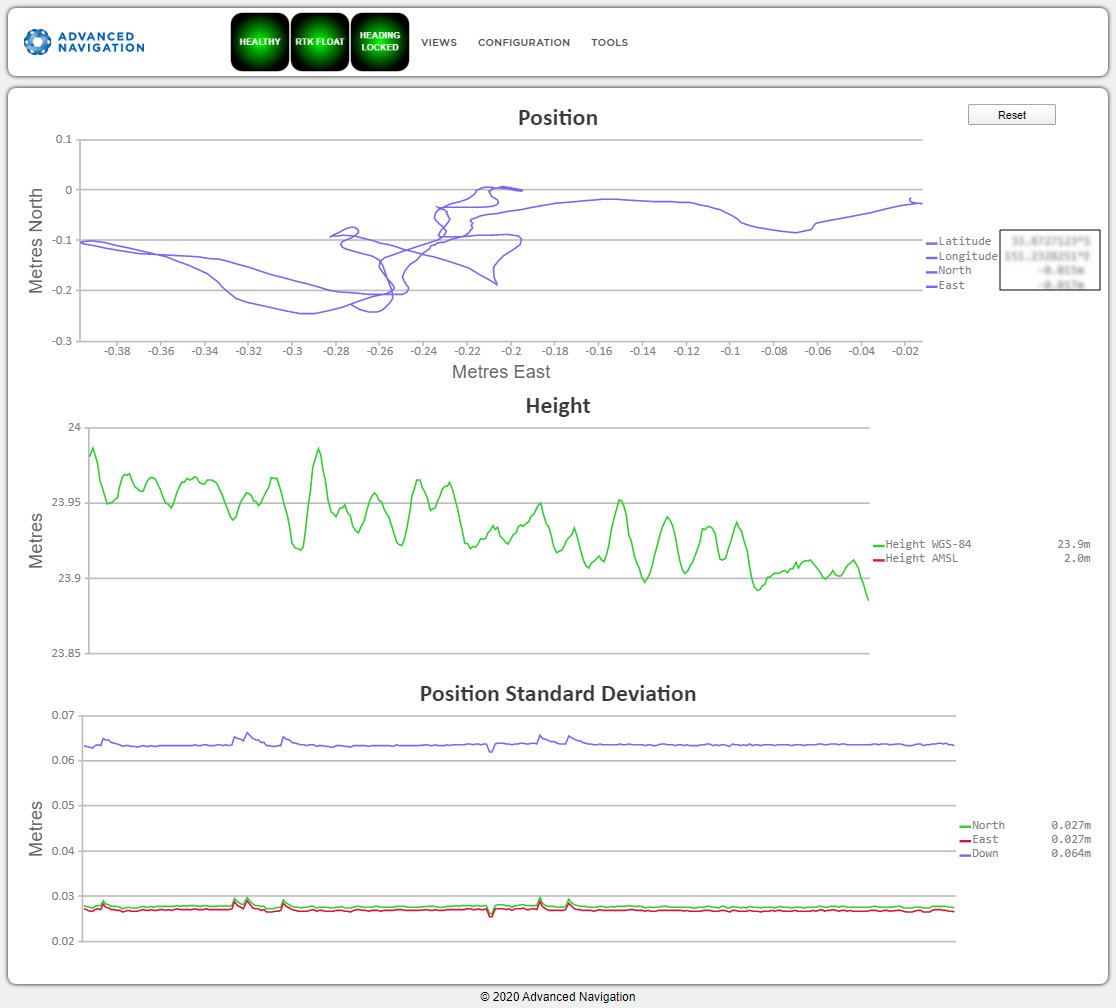
INS Web UI Position Page
Velocity and Acceleration
The Velocity and Acceleration page shows the INS velocity, acceleration and g-force.
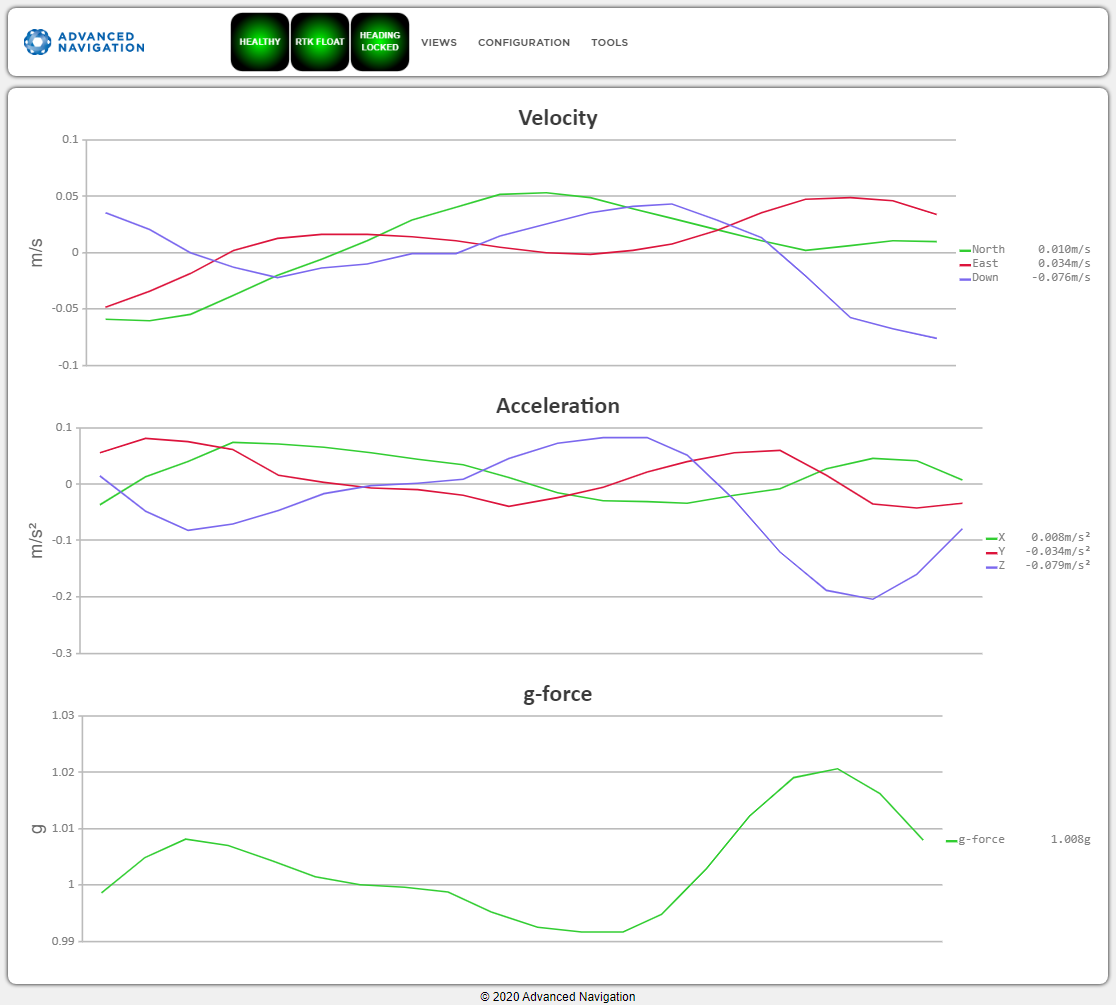
INS Web UI Velocity and Acceleration Page
Vessel Motion
This page displays the vessel motion (heave, surge, sway) at 4 reference points. Reference point offsets for vessel motion can be configured on the Configuration Menu page.
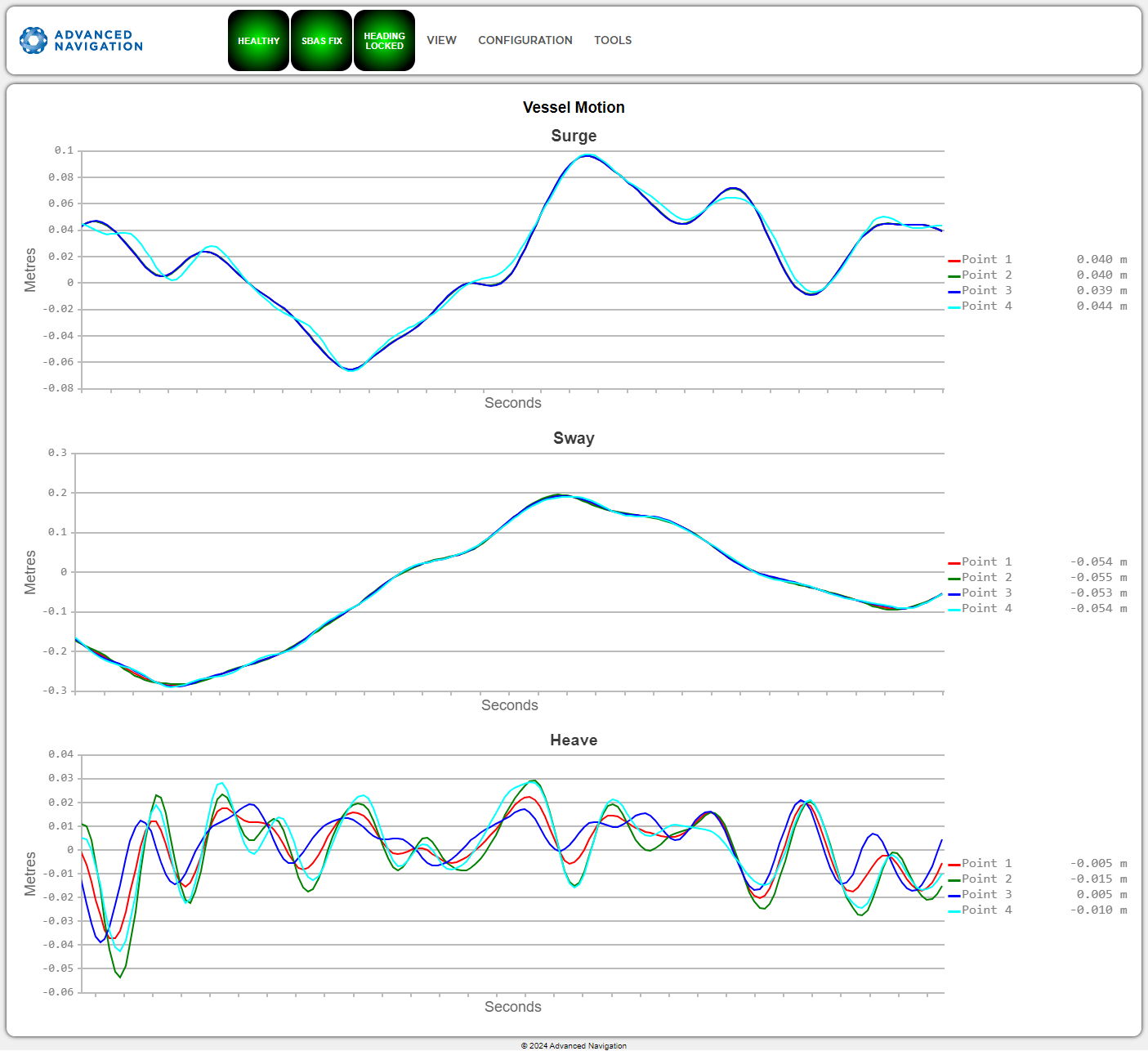
INS Web UI Vessel Motion Page
Coarse Heading Alignment
Coarse Alignment is used to derive the heading based on a gyrocompass' estimation of true North. For more information, see Heading Sources. Coarse alignment is necessary to establish an approximate heading when a dual antenna GNSS heading or alternate source is unavailable, such as in a GNSS denied environment. Once coarse alignment is complete, a heading is established, after which the gyrocompass will be used for fine alignment.
The Coarse Heading Alignment page displays the current status of the initialisation process. Given below is a list statuses and warnings that may be displayed during this process:
| Status Messages | Description |
|---|---|
| Awaiting position via GNSS or manual initialisation | An approximate position is required to complete coarse alignment. Initialisation will commence as soon as the position is available. If GNSS positioning is not available, provide the position details manually on the Manual Initialisation page. |
| Initialising, please wait | With the position known, the process of determining the coarse heading alignment has commenced. This process will take 2 minutes, unless it is restarted due to excessive motion or a significant change in latitude. |
| Alignment initialised via alternate source | Coarse alignment is not required as heading has been initialised via an alternate source, such as dual antenna , velocity or external input. If heading is available from one of these sources, coarse alignment is not required. |
| Heading coarse alignment complete | The system has successfully determined an approximate heading. |
Coarse Heading Alignment - Status Messages
| Warning Messages | Description |
|---|---|
| Initialisation restarted - excessive motion detected | Initialisation has been automatically restarted due to excessive motion (linear acceleration limit of 2 g and angular rate limit of 50 deg/s). |
|
Initialisation restarted - change in latitude detected |
Initialisation has been automatically restarted due to a significant change in latitude. |
| Initialisation restarted - Change in COG lever arm detected | Initialisation has been automatically restarted due to a change in the Centre of Gravity (COG) lever arm configuration. |
| Warning - Check latitude, value out of range | A discrepancy between the current latitude and the coarse alignment algorithm has been detected. Check the current latitude is correct. |
Coarse Heading Alignment - Warning Messages
External Data Selection
This jump page is used to open time-based data graphs for each external source supported.
External sources need to be connected and configured appropriately for the corresponding packet to report valid data. For more information, refer to External Data.
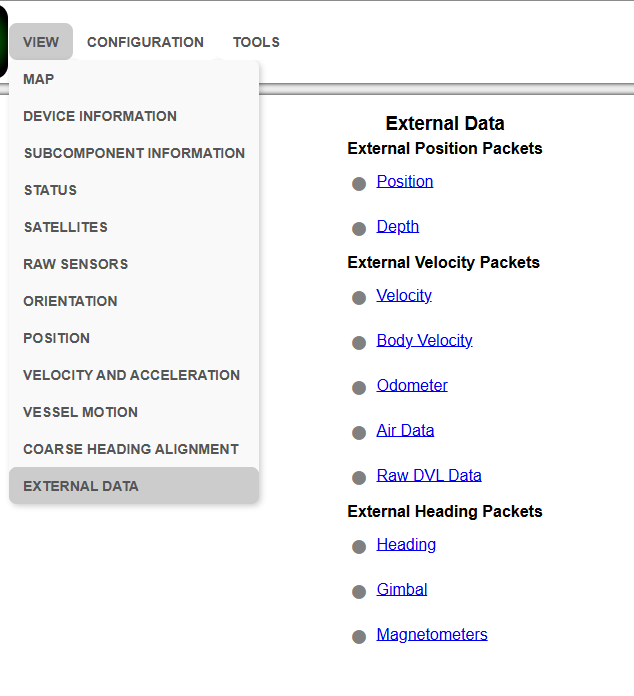
INS Web UI External Data Selection Page
| Indicator color next to External Packet Link source | Validity of incoming data from external source |
|---|---|
| Green | Valid |
| Grey | Invalid |